
RenegadeMx
Kosovo is Serbian
- Joined
- May 6, 2014
- Messages
- 1,301
- Gender
- Male
- HSC
- 2011
- Uni Grad
- 2016
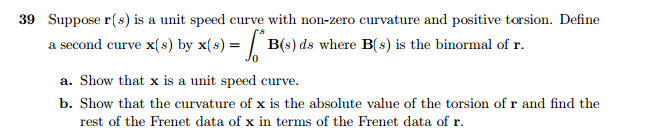
part b seems pretty confusing for me..
Students helping students, join us in improving Bored of Studies by donating and supporting future students!
well since the curve is parametrised by binormal instead of the usual arc length im used to, but otherwise its still the same?What are you finding confusing?
You are given an explicit expression for your smooth curve x, so you just need to compute the Frenet data as per the definitions.
You will end up with something like:
T_2=B_1
N_2=-N_1
B_2=T_1
k_2=t_1
t_2=k_1.
Where T,N,B,k,t denote the tangent, normal, binormal, curvature and torsion respectively.
(Carry out these calculations carefully yourself, there could easily be a small mistake in my answer. Haven't done this kind of stuff in a while.)
